2. Robot brief introduction
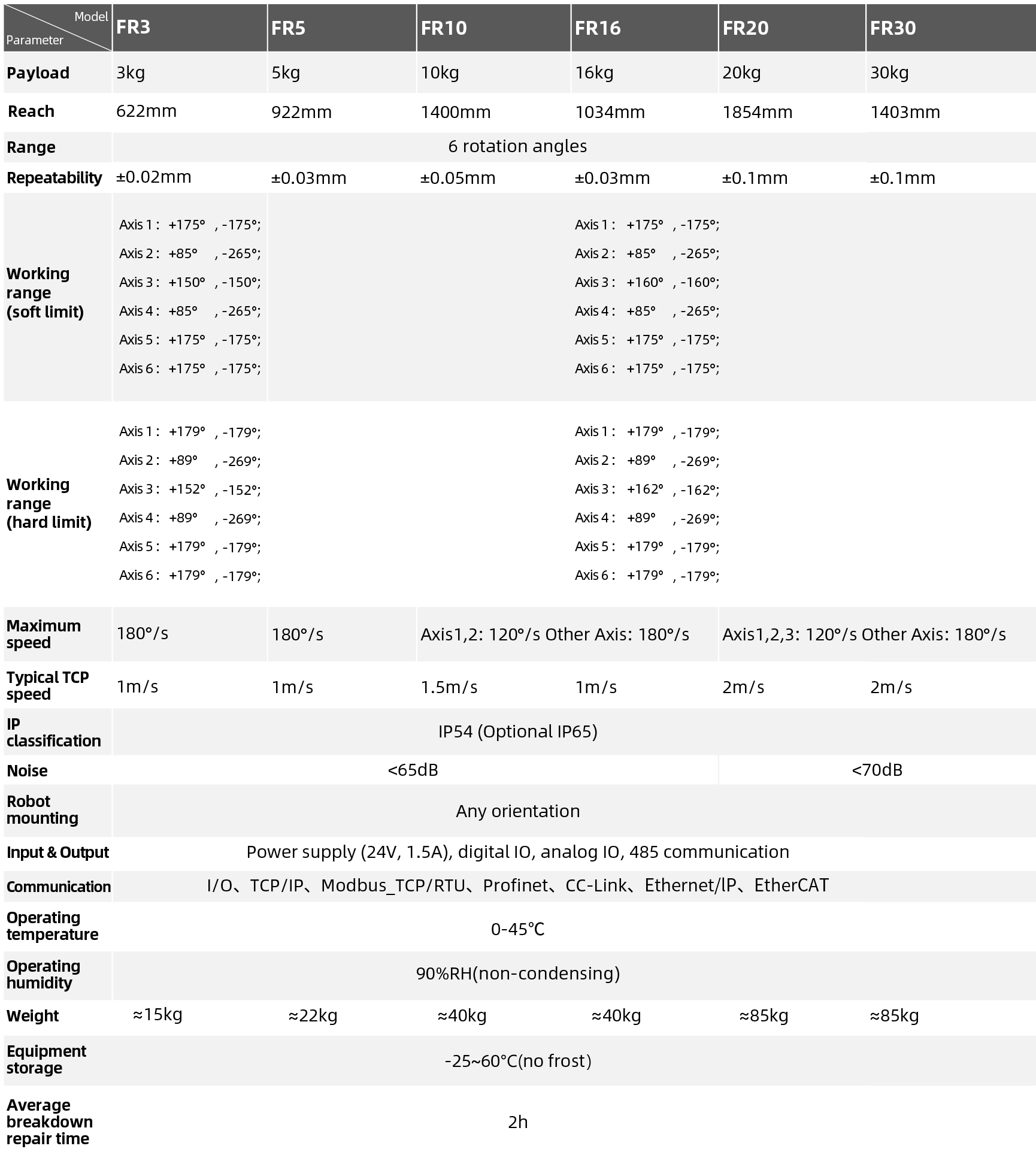
2.1. Basic parameters
Table 2.1-1 Basic parameters of robotics

Important
When the FR series robot performs attitude or coordinate system transformation, the angle rotation sequence calculated by the homogeneous transformation matrix is “ZYX” of the floating coordinate system.
2.2. Motion
Robotic arm installation space:
The installation of the robot body requires a space of 3m × 3m × 2m (length × width × height) to meet the motion under the maximum wingspan of the robot; if the user increases the end load by itself, make sure that there is a minimum 500mm gap in the installation space.
Note
The height space is affected by the height of the installation base, where 2m refers to the distance above the installation reference plane
Control cabinet installation space:
The control box should be placed in easy operation to prevent water flooding, 0.6m-1.5m from the ground.
The cabinet must be far away from the heat source.
On one side of the control box’s heavy load line, there should be no obstruction within 150mm, and the remaining side shall be not covered within 100mm, which is convenient for heat dissipation and extraction.
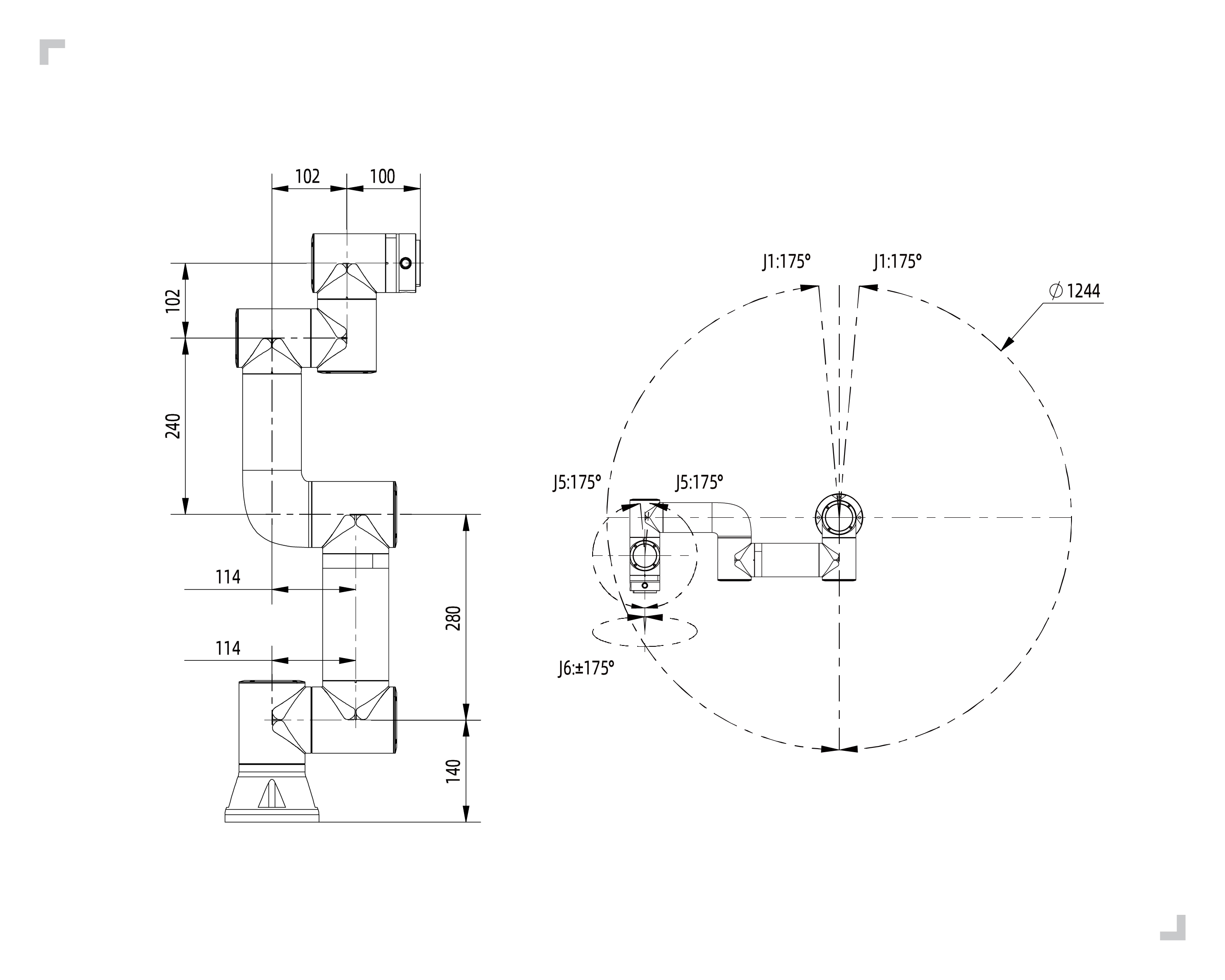
Figure 2.1-1 FR3 model collaboration robot movement range

Figure 2.2-2 FR3-WML model collaboration robot movement range

Figure 2.2-3 FR3-WMS model collaboration robot movement range

Figure 2.2-4 FR3-C model collaboration robot movement range
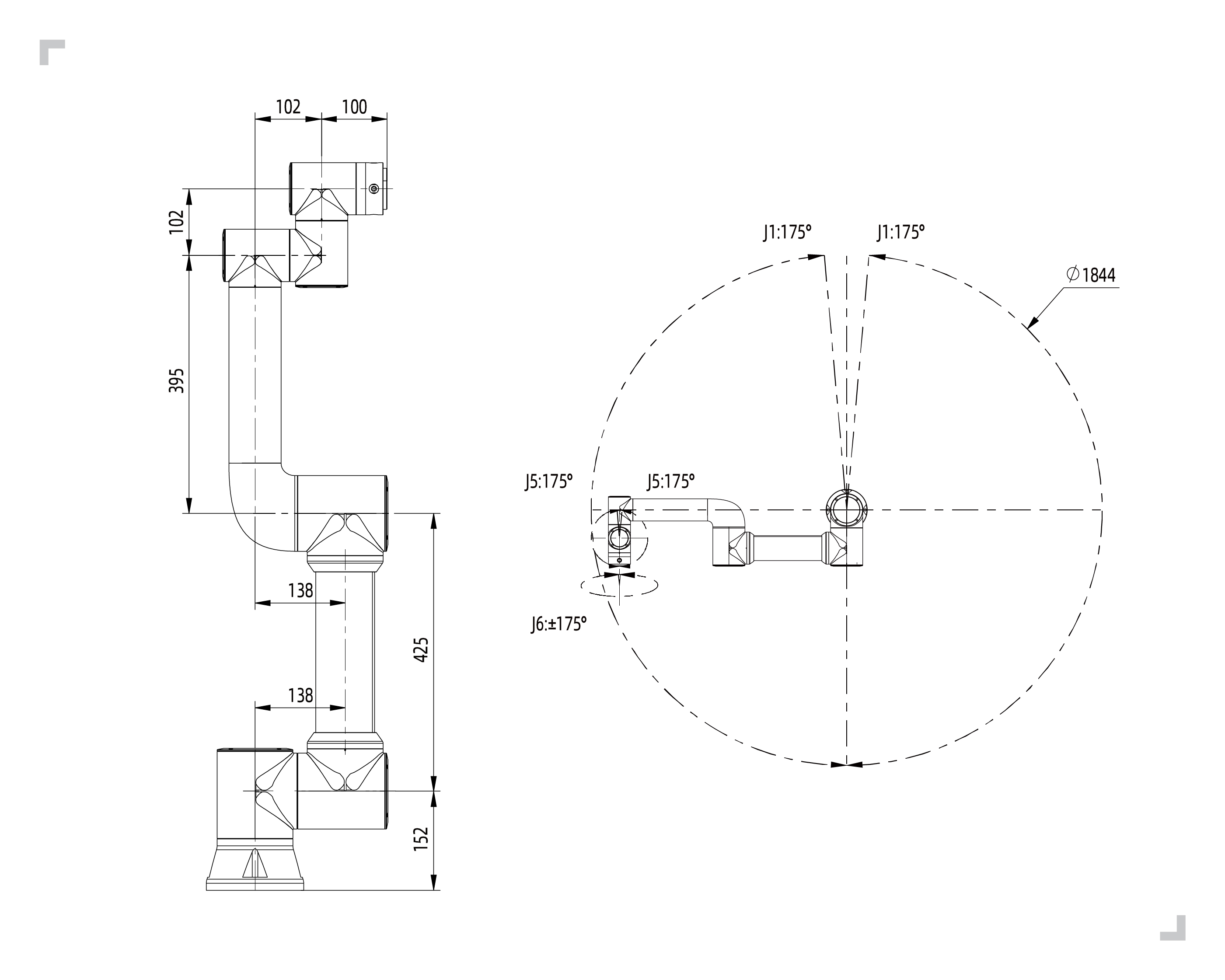
Figure 2.1-5 FR5 model collaboration robot movement range

Figure 2.2-6 FR5-C Model Collaborative Robot Motion Range
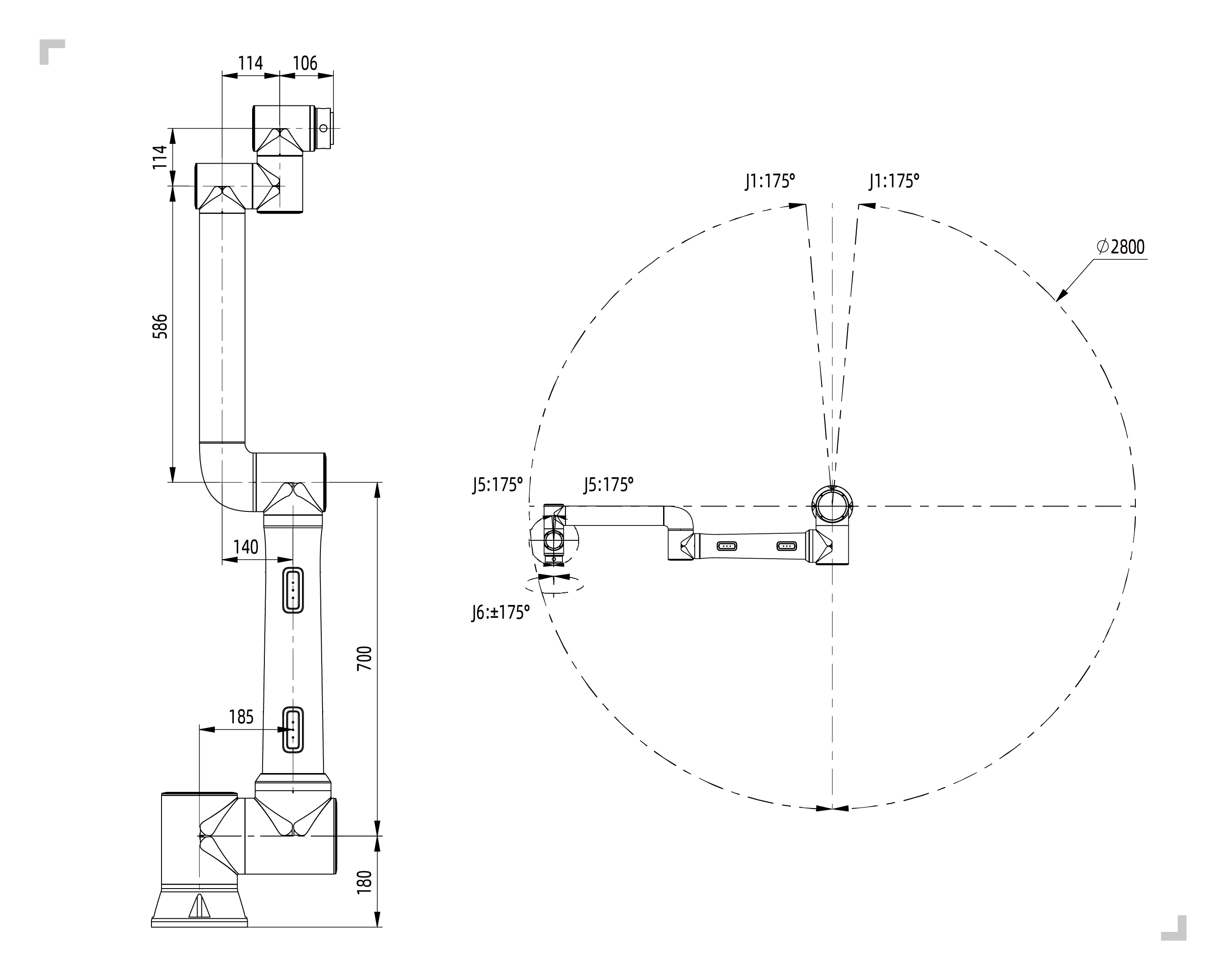
Figure 2.1-7 FR10 model collaboration robot movement range
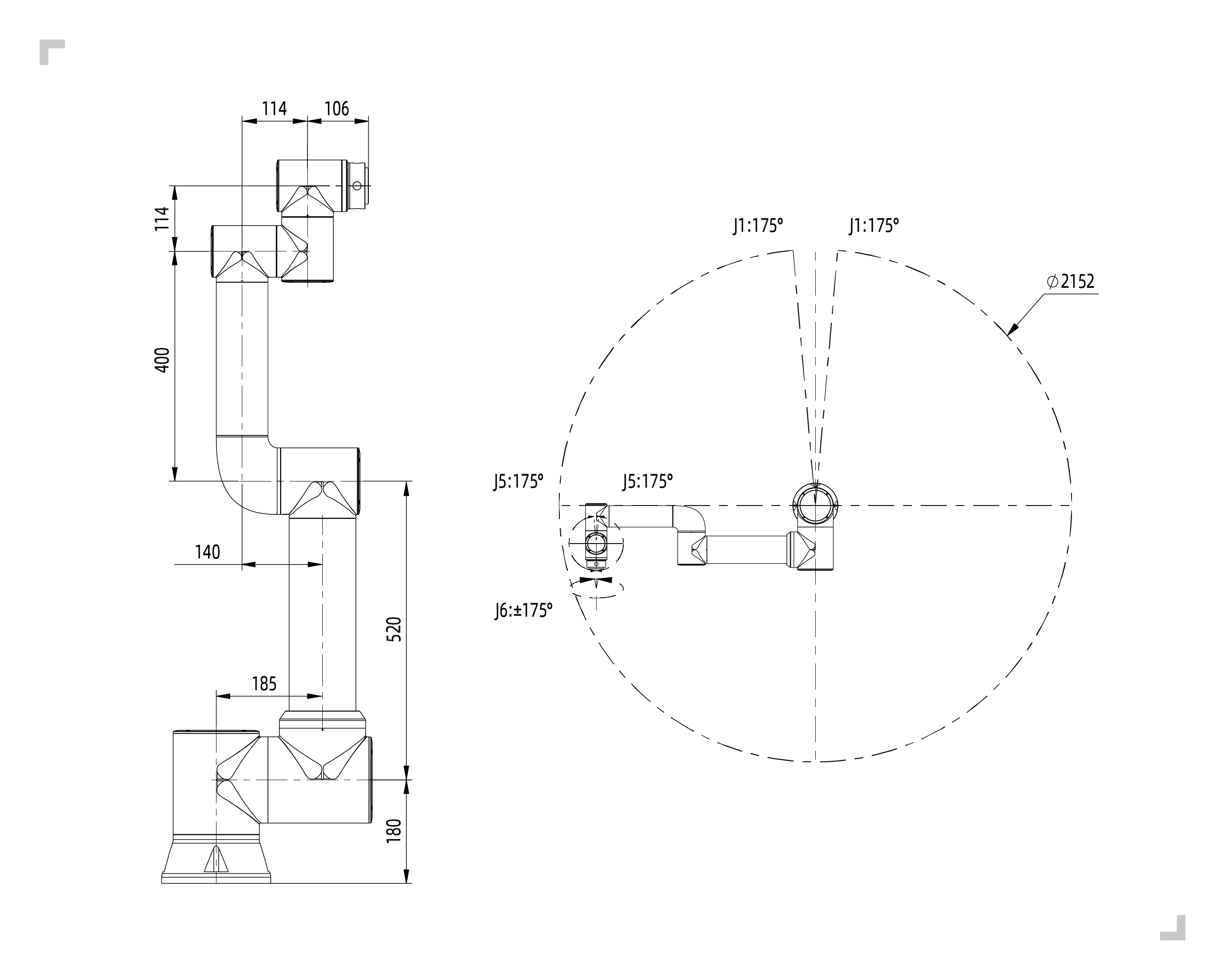
Figure 2.1-8 FR16 model collaboration robot movement range
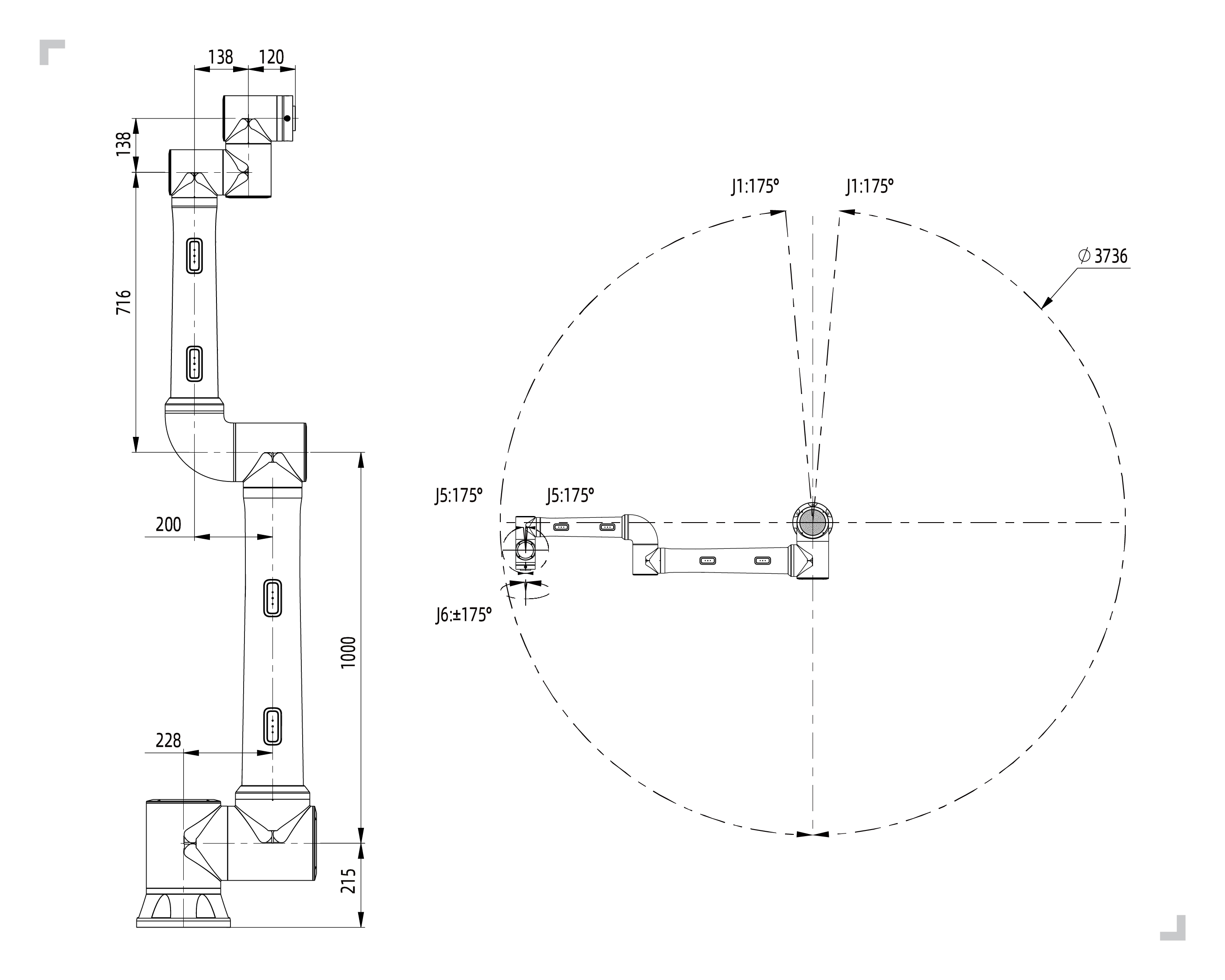
Figure 2.1-9 FR20 model collaboration robot movement range

Figure 2.1-10 FR30 model collaboration robot movement range

Figure 2.1-11 FR30L model collaboration robot movement range
2.3. Robot coordinate system
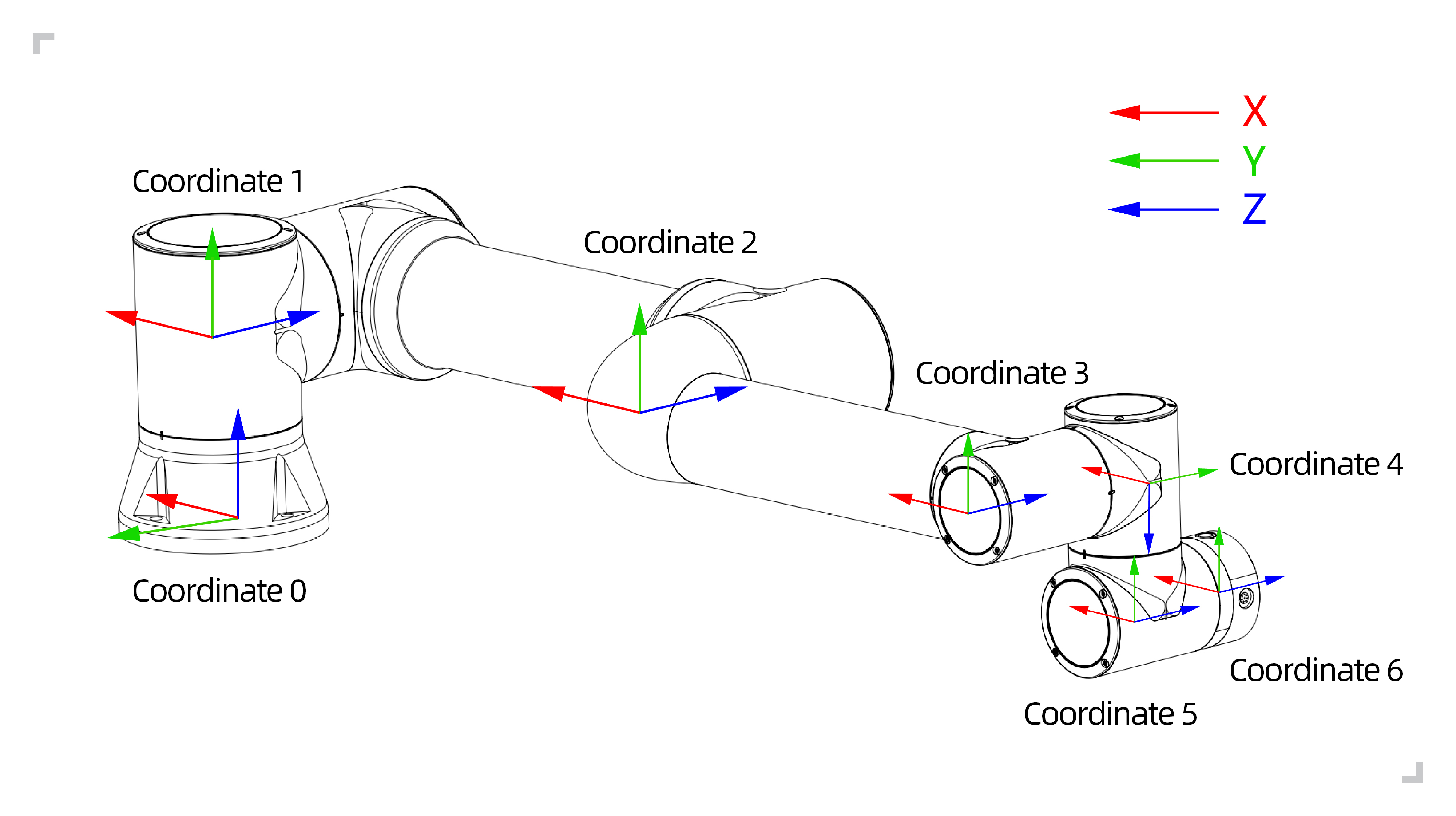
Figure 2.3-1 Robot DH parameter coordinate system
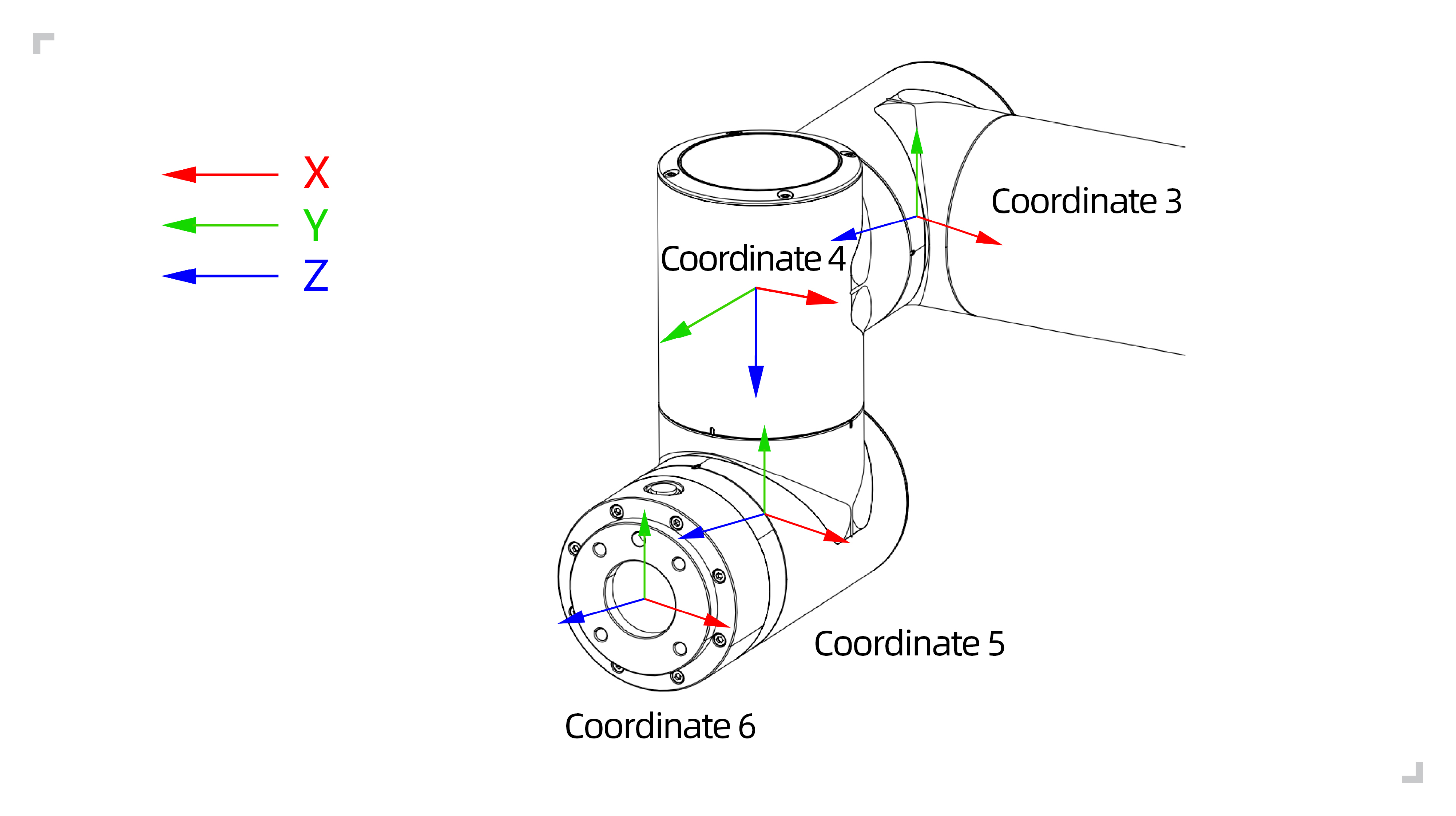
Figure 2.3-2 French -endframe coordinate system
2.4. Robot Denavit–Hartenberg parameters
Denavit–Hartenberg parameters are used to calculate kinematics and dynamics of FR series collaborative robots.

Figure 2.4-1 FR series collaborative robots Denavit–Hartenberg parameters
The Denavit–Hartenberg parameters of FR series collaborative robots are shown as below.
Table 2.4-1 FR3 model collaboration robot Denavit–Hartenberg parameter
Kinematics |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamics |
Mass[kg] |
Center of Mass[mm] |
Joint1 |
0 |
0 |
140 |
π/2 |
link1 |
2.24 |
[-0.05, -15.92, 2.26] |
Joint2 |
0 |
-280 |
0 |
0 |
link2 |
4.94 |
[139.49, 0, 99.54] |
Joint3 |
0 |
-240 |
0 |
0 |
link3 |
2.29 |
[58.99, 0.08, 12.99] |
Joint4 |
0 |
0 |
102 |
π/2 |
link4 |
1.56 |
[0.05, -2.33, 14.67] |
Joint5 |
0 |
0 |
102 |
-π/2 |
link5 |
1.56 |
[-0.05, 2.33, 14.67] |
Joint6 |
0 |
0 |
100 |
0 |
link6 |
0.36 |
[-0.55, -1.11, -20.05] |
Table 2.4-2 FR3-WMS model collaboration robot Denavit–Hartenberg parameter
Kinematics |
theta [rad] |
a[mm] |
d[mm] |
alpha [rad] |
Dynamics |
Mass [kg] |
Center of Mass[m] |
Joint1 |
0 |
140 |
0 |
π/2 |
Link1 |
1.66 |
[-0.06,-13.58,1.68] |
Joint2 |
0 |
0 |
-280 |
0 |
Link2 |
3.68 |
[140.11,0,101.71] |
Joint3 |
0 |
0 |
-240 |
0 |
Link3 |
1.81 |
[63.49,0.1,10.94] |
Joint4 |
0 |
102 |
0 |
π/2 |
Link4 |
1.18 |
[0.07,-2.18,12.48] |
Joint5 |
0 |
102 |
0 |
-π/2 |
Link5 |
1.18 |
[-0.07,2.18,12.48] |
Joint6 |
0 |
100 |
0 |
0 |
Link6 |
0.28 |
[1.81,1.33,-20.41] |
Table 2.4-3 FR3-WML model collaboration robot Denavit–Hartenberg parameter
Kinematics |
theta [rad] |
a[mm] |
d[mm] |
alpha [rad] |
Dynamics |
Mass [kg] |
Center of Mass[m] |
Joint1 |
0 |
140 |
0 |
π/2 |
Link1 |
1.54 |
[-0.01,-14.27,1.37] |
Joint2 |
0 |
0 |
-425 |
0 |
Link2 |
3.49 |
[212.5,0,101.43] |
Joint3 |
0 |
0 |
-395 |
0 |
Link3 |
2 |
[114.17,0.08,9.92] |
Joint4 |
0 |
102 |
0 |
π/2 |
Link4 |
1.17 |
[0.07,-2.18,12.48] |
Joint5 |
0 |
102 |
0 |
-π/2 |
Link5 |
1.17 |
[-0.07,2.18,12.48] |
Joint6 |
0 |
100 |
0 |
0 |
Link6 |
0.28 |
[1.9,1.6,-20.08] |
Table 2.4-4 FR3-C model collaboration robot Denavit–Hartenberg parameter
Kinematics |
theta [rad] |
a[mm] |
d[mm] |
alpha [rad] |
Dynamics |
Mass [kg] |
Center of Mass[m] |
Joint1 |
0 |
140 |
0 |
π/2 |
Link1 |
1.69 |
[-0.16,-13.99,1.53] |
Joint2 |
0 |
0 |
-280 |
0 |
Link2 |
3.73 |
[140,0,101.34] |
Joint3 |
0 |
0 |
-240 |
0 |
Link3 |
1.84 |
[63.24,0.08,11.04] |
Joint4 |
0 |
102 |
0 |
π/2 |
Link4 |
1.2 |
[0.1,-2.03,12.55] |
Joint5 |
0 |
102 |
0 |
-π/2 |
Link5 |
1.2 |
[-0.1,2.03,12.55] |
Joint6 |
0 |
100 |
0 |
0 |
Link6 |
0.53 |
[1.48,1.54,-17.9] |
Table 2.4-5 FR5 model collaboration robot Denavit–Hartenberg parameter
Kinematics |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamics |
Mass[kg] |
Center of Mass[mm] |
Joint1 |
0 |
0 |
152 |
π/2 |
link1 |
4.64 |
[-0.19, -18.28, 2.26] |
Joint2 |
0 |
-425 |
0 |
0 |
link2 |
10.08 |
[212.47, 0, 121.2] |
Joint3 |
0 |
-395 |
0 |
0 |
link3 |
2.71 |
[122.62, 0.17, 12.59] |
Joint4 |
0 |
0 |
102 |
π/2 |
link4 |
1.56 |
[0.05, -2.33, 14.68] |
Joint5 |
0 |
0 |
102 |
-π/2 |
link5 |
1.56 |
[-0.05, 2.33, 14.68] |
Joint6 |
0 |
0 |
100 |
0 |
link6 |
0.36 |
[0.93, 0.81, -20.05] |
Table 2.4-6 FR5-C Collaborative Robot DH Parameters
Kinematics |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamics |
Mass[kg] |
Center of Mass[mm] |
Joint1 |
0 |
0 |
140 |
π/2 |
Link1 |
1.76 |
[-0.09, -15.66, 1.53] |
Joint2 |
0 |
-280 |
0 |
0 |
Link2 |
3.98 |
[211.32, 0, 101.13] |
Joint3 |
0 |
-240 |
0 |
0 |
Link3 |
2.08 |
[102.62, 0.12, 11.26] |
Joint4 |
0 |
0 |
102 |
π/2 |
Link4 |
1.33 |
[0.09, -1.86, 13.76] |
Joint5 |
0 |
0 |
102 |
-π/2 |
Link5 |
1.33 |
[-0.09, 1.86, 13.76] |
Joint6 |
0 |
0 |
100 |
0 |
Link6 |
0.28 |
[-0.26, 1.75, -20.50] |
Table 2.4-7 FR5-WML model collaboration robot Denavit–Hartenberg parameter
Kinematics |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamics |
Mass[kg] |
Center of Mass[mm] |
Joint1 |
0 |
180 |
0 |
π/2 |
Link1 |
11.49 |
[-0.16, -28.51, 4.16] |
Joint2 |
0 |
0 |
-970 |
0 |
Link2 |
21.3 |
[642.59, 0.04, 165.62] |
Joint3 |
0 |
0 |
-8160 |
0 |
Link3 |
4.61 |
[321.39, 0.16, 52.76] |
Joint4 |
0 |
159 |
0 |
π/2 |
Link4 |
1.66 |
[0.21, -3.06, 13.07] |
Joint5 |
0 |
114 |
0 |
-π/2 |
Link5 |
1.66 |
[-0.21, 3.06, 13.07] |
Joint6 |
0 |
160 |
0 |
0 |
Link6 |
0.36 |
[1.45, 1.09, -19.98] |
Table 2.4-8 FR10 model collaboration robot Denavit–Hartenberg parameter
Kinematics |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamics |
Mass[kg] |
Center of Mass[mm] |
Joint1 |
0 |
0 |
180 |
π/2 |
link1 |
11.97 |
[-0.10, -26.12, 4.04] |
Joint2 |
0 |
-700 |
0 |
0 |
link2 |
19.59 |
[480.27, 0.01, 164.68] |
Joint3 |
0 |
-586 |
0 |
0 |
link3 |
3.7 |
[211.22, 0.11, 54.21] |
Joint4 |
0 |
0 |
159 |
π/2 |
link4 |
1.69 |
[0.12, -3, 12.18] |
Joint5 |
0 |
0 |
114 |
-π/2 |
link5 |
1.69 |
[-0.12, 3, 12.18] |
Joint6 |
0 |
0 |
106 |
0 |
link6 |
0.35 |
[1.24, 0.85, -20.34] |
Table 2.4-9 FR16 model collaboration robot Denavit–Hartenberg parameter
Kinematics |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dynamics |
Mass[kg] |
Center of Mass[mm] |
Joint1 |
0 |
0 |
180 |
π/2 |
link1 |
11.97 |
[-0.10, -26.12, 4.04] |
Joint2 |
0 |
-520 |
0 |
0 |
link2 |
18.18 |
[364.4, 0.01, 163.09] |
Joint3 |
0 |
-400 |
0 |
0 |
link3 |
3.22 |
[135.03, 0.12, 55.58] |
Joint4 |
0 |
0 |
159 |
π/2 |
link4 |
1.69 |
[0.12, -3, 12.18] |
Joint5 |
0 |
0 |
114 |
-π/2 |
link5 |
1.69 |
[-0.12, 3, 12.18] |
Joint6 |
0 |
0 |
106 |
0 |
link6 |
0.35 |
[1.24, 0.85, -20.34] |
Table 2.4-10 FR20 model collaboration robot Denavit–Hartenberg parameter
Kinematics |
theta [rad] |
a[mm] |
d[mm] |
alpha [rad] |
Dynamics |
Mass [kg] |
Center of Mass[m] |
Joint1 |
0 |
0 |
215 |
π/2 |
link1 |
20.79 |
[-0.19, -36.57, 5.68] |
Joint2 |
0 |
-1000 |
0 |
0 |
link2 |
42.84 |
[605.25, 0.06, 202.94] |
Joint3 |
0 |
-716 |
0 |
0 |
link3 |
9.88 |
[262.84, 0.22, 43.08] |
Joint4 |
0 |
0 |
166 |
π/2 |
link4 |
4.64 |
[0.23, -2.28, 18.42] |
Joint5 |
0 |
0 |
138 |
-π/2 |
link5 |
4.64 |
[-0.23, 2.28, 18.42] |
Joint6 |
0 |
0 |
120 |
0 |
link6 |
0.6 |
[-2.11, -1.96, -20.38] |
Table 2.4-11 FR30 model collaboration robot Denavit–Hartenberg parameter
Kinematics |
theta [rad] |
a[mm] |
d[mm] |
alpha [rad] |
Dynamics |
Mass [kg] |
Center of Mass[m] |
Joint1 |
0 |
0 |
215 |
π/2 |
link1 |
20.64 |
[-0.22, -37.39, 5.59] |
Joint2 |
0 |
-700 |
0 |
0 |
link2 |
36.37 |
[440.73, 0.05, 198.7] |
Joint3 |
0 |
-536 |
0 |
0 |
link3 |
8.41 |
[185.64, 0.25, 45.82] |
Joint4 |
0 |
0 |
166 |
π/2 |
link4 |
4.64 |
[0.23, -2.29, 18.60] |
Joint5 |
0 |
0 |
138 |
-π/2 |
link5 |
4.64 |
[-0.23, 2.29, 18.60] |
Joint6 |
0 |
0 |
120 |
0 |
link6 |
0.6 |
[-2.11, -1.96, -20.38] |
Table 2.4-12 FR30L model collaboration robot Denavit–Hartenberg parameter
Kinematics |
theta [rad] |
a[mm] |
d[mm] |
alpha [rad] |
Dynamics |
Mass [kg] |
Center of Mass[m] |
Joint1 |
0 |
0 |
215 |
π/2 |
Link1 |
27.85 |
[-0.18, -26.29, 14.57] |
Joint2 |
0 |
-1000 |
0 |
0 |
Link2 |
50.43 |
[580.62, 0.04, 223.34] |
Joint3 |
0 |
-716 |
0 |
0 |
Link3 |
9.88 |
[262.84, 0.22, 43.08] |
Joint4 |
0 |
0 |
166 |
π/2 |
Link4 |
4.64 |
[0.23, -2.28, 18.42] |
Joint5 |
0 |
0 |
138 |
-π/2 |
Link5 |
4.64 |
[-0.23, 2.28, 18.42] |
Joint6 |
0 |
0 |
120 |
0 |
Link6 |
0.6 |
[-2.11, -1.96, -20.38] |